การโปรแกรมอุปกรณ์เสริม เซอร์โวเพื่อเพิ่มความสามารถหุ่นยนต์
- การเขียนโปรแกรม ตั้งค่าเซอร์โวก่อนติดตั้งบนอุปกรณ์เสริม
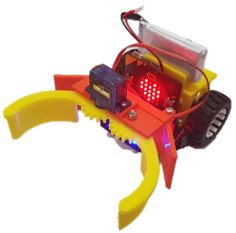
- ติดตั้งเซอร์โวบนอุปกรณ์เสริม แขนจับ และ อุปกรณ์ปล่อยลูกบากศ์
- การสร้างฟังก์ชันเพื่อเซตค่าอุปกรณ์เสริมให้ทำงานตามภารกิจ
- การเอาฟังก์ชั่น ไปใช้ในการแก้ปัญหาภารกิจที่กำหนด |